Hello, I am Lingala Manisha!
Master's Student in Electronics and Electrical Engineering
A passionate explorer in the world of robotics, artificial intelligence, and intelligent systems.

A passionate explorer in the world of robotics, artificial intelligence, and intelligent systems.
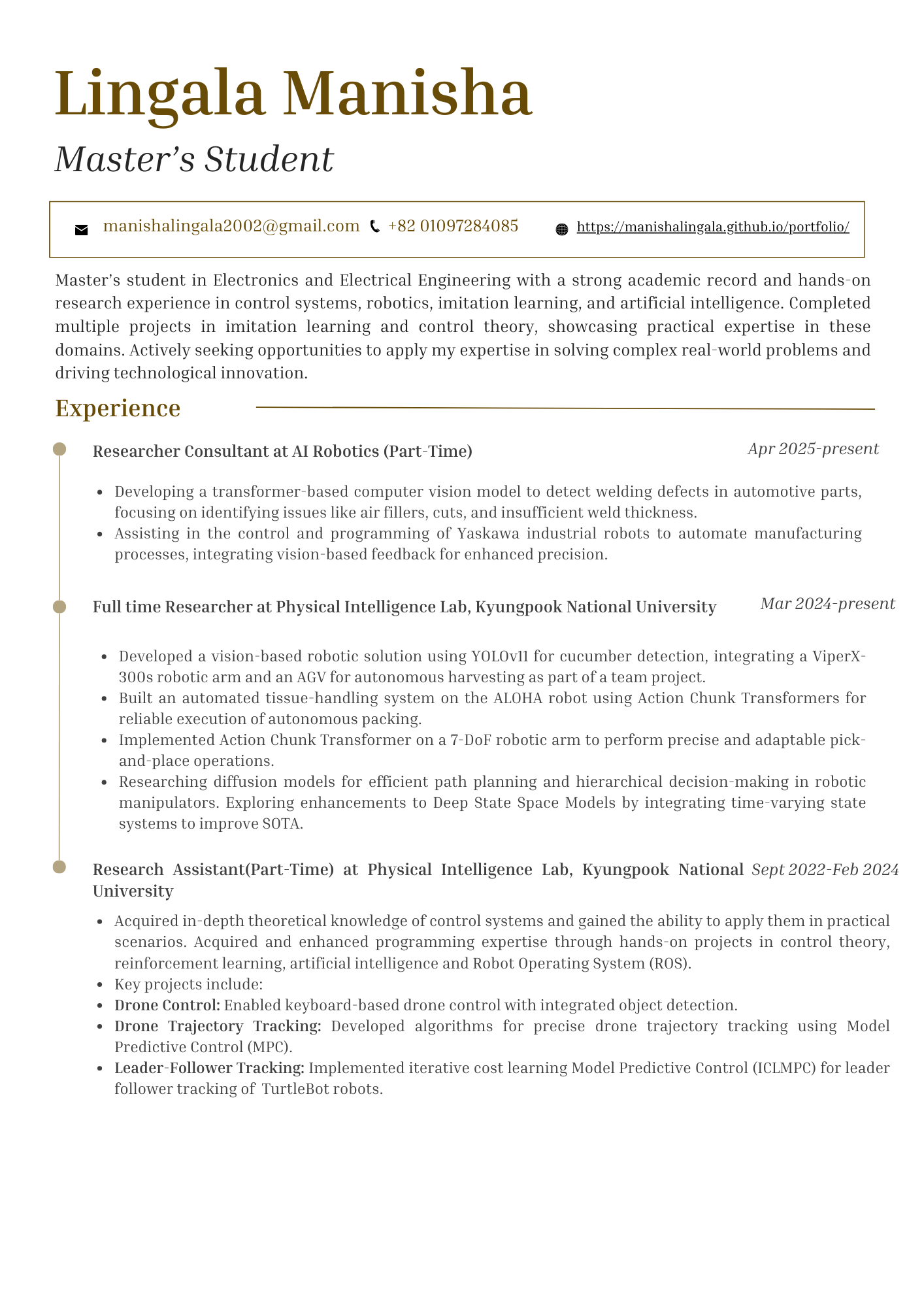
I'm currently pursuing my Master's in Electronics and Electrical Engineering at Kyungpook National University, where I'm part of the Physical Intelligence Lab. My work lies at the intersection of control systems, robotic manipulation, and machine learning. Simply put, I teach robots how to move, learn, and think.
From programming drones to follow dynamic trajectories, to training robotic arms to pick up delicate objects, I've always been fascinated by the beautiful blend of logic and creativity that defines engineering.
But beyond the code and circuits, I'm a thinker, a learner, and a storyteller. I believe every robot I build is a story — of innovation, failure, resilience, and breakthrough.
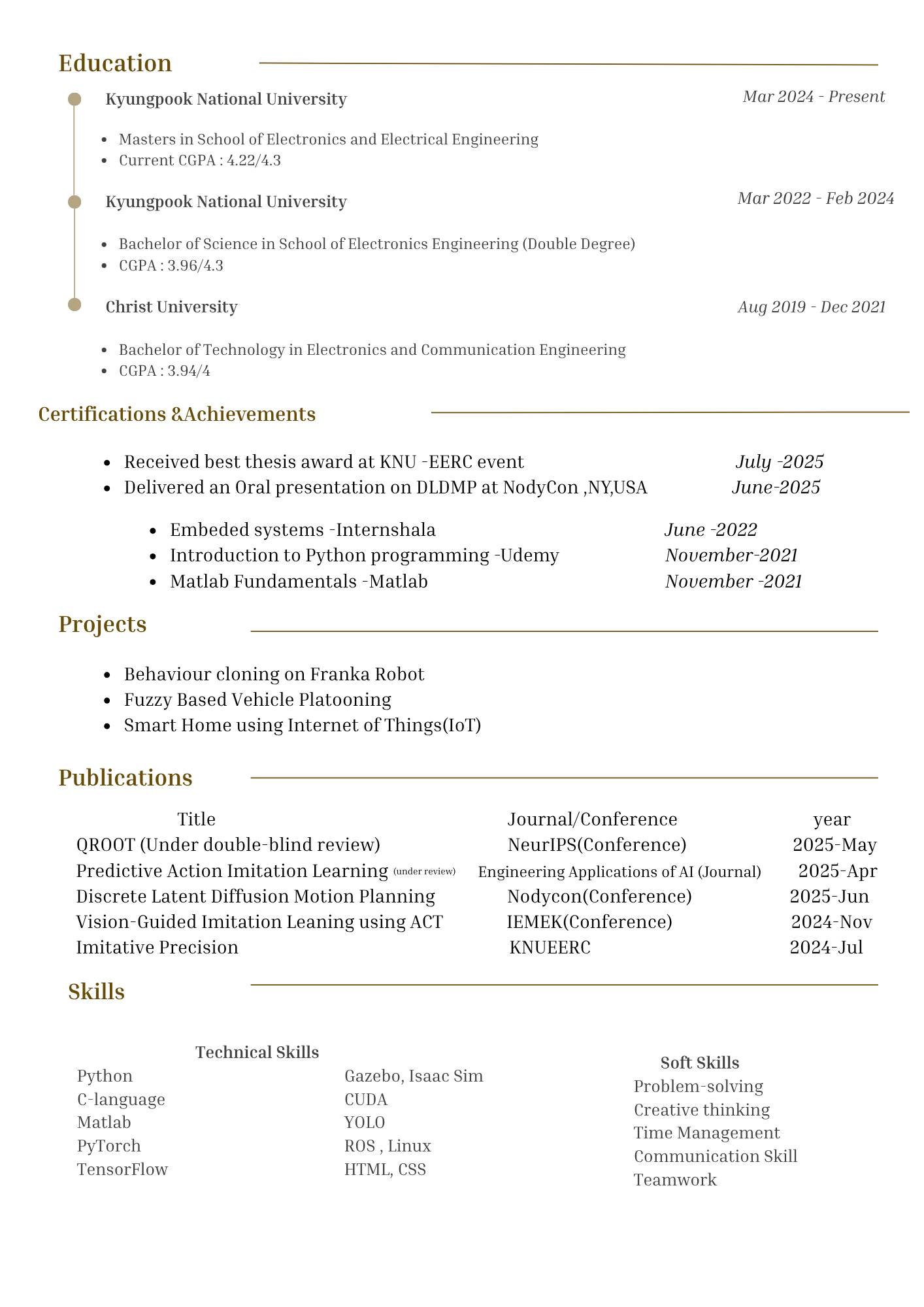
2024 - present
Current GPA: 4.22/4.3
Key Focus: Robotics, AI, and Diffusion Models
2022-2024
GPA: 3.96/4.3
Key Focus: Advanced Robotics and AI Systems
2019-2024
GPA: 3.94/4
Key Focus: Robotics and Signal Processing

Developed a cucumber harvesting system using YOLOv11 object detection that identifies cucumbers and triggers coordinated actions between a ViperX 300s robotic arm and an Automated Guided Vehicle (AGV).
Click Here to Watch Video
This system uses two coordinated robotic arms — one loads tissues into an empty box, while the other transfers the filled box to a designated location automating hygienic and efficient tissue handling..
Click Here to Watch Video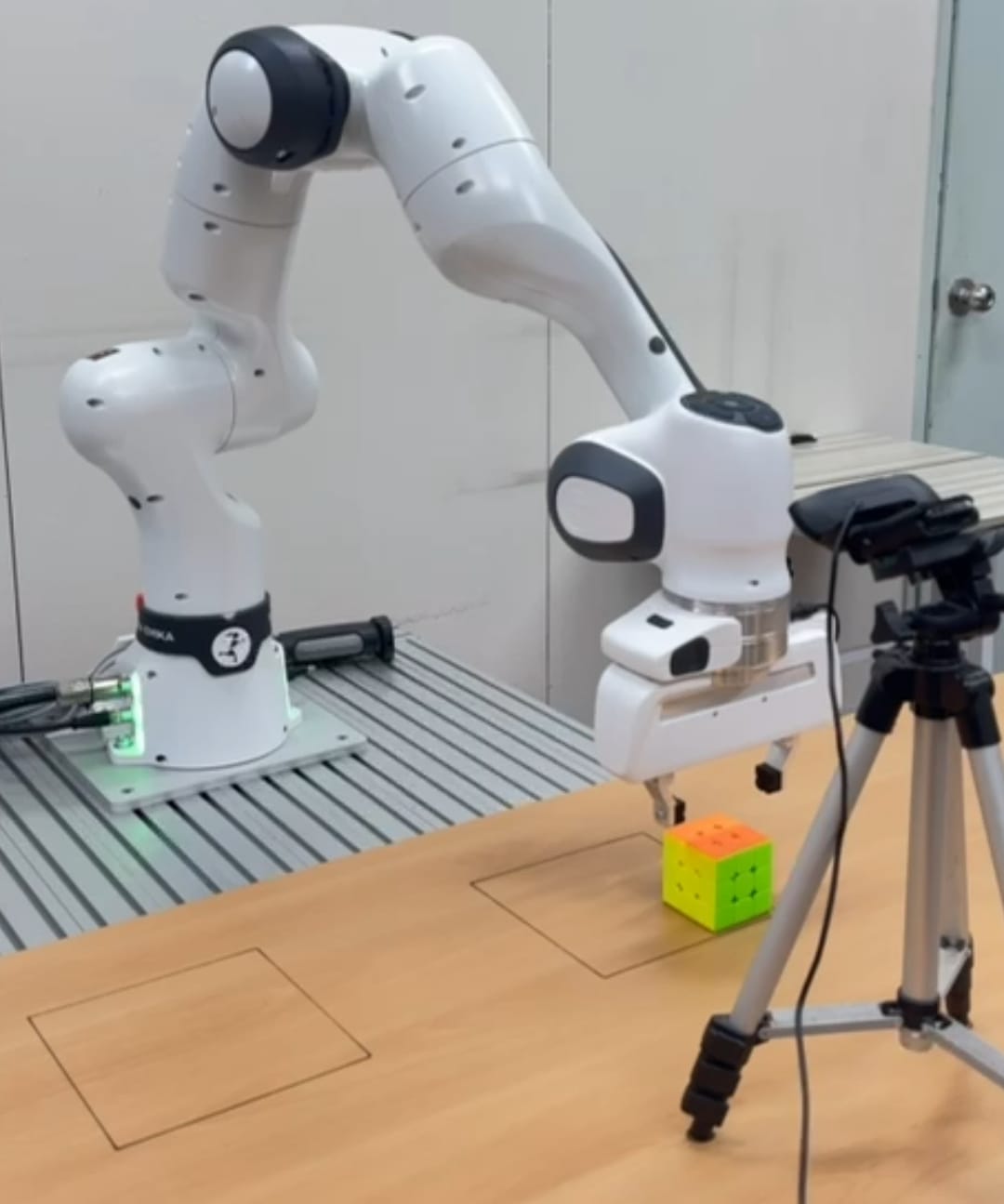
Implementing Action Chunk Transformers on Franka robot arms for more efficient and natural robotic manipulation tasks.
Click Here to Watch Video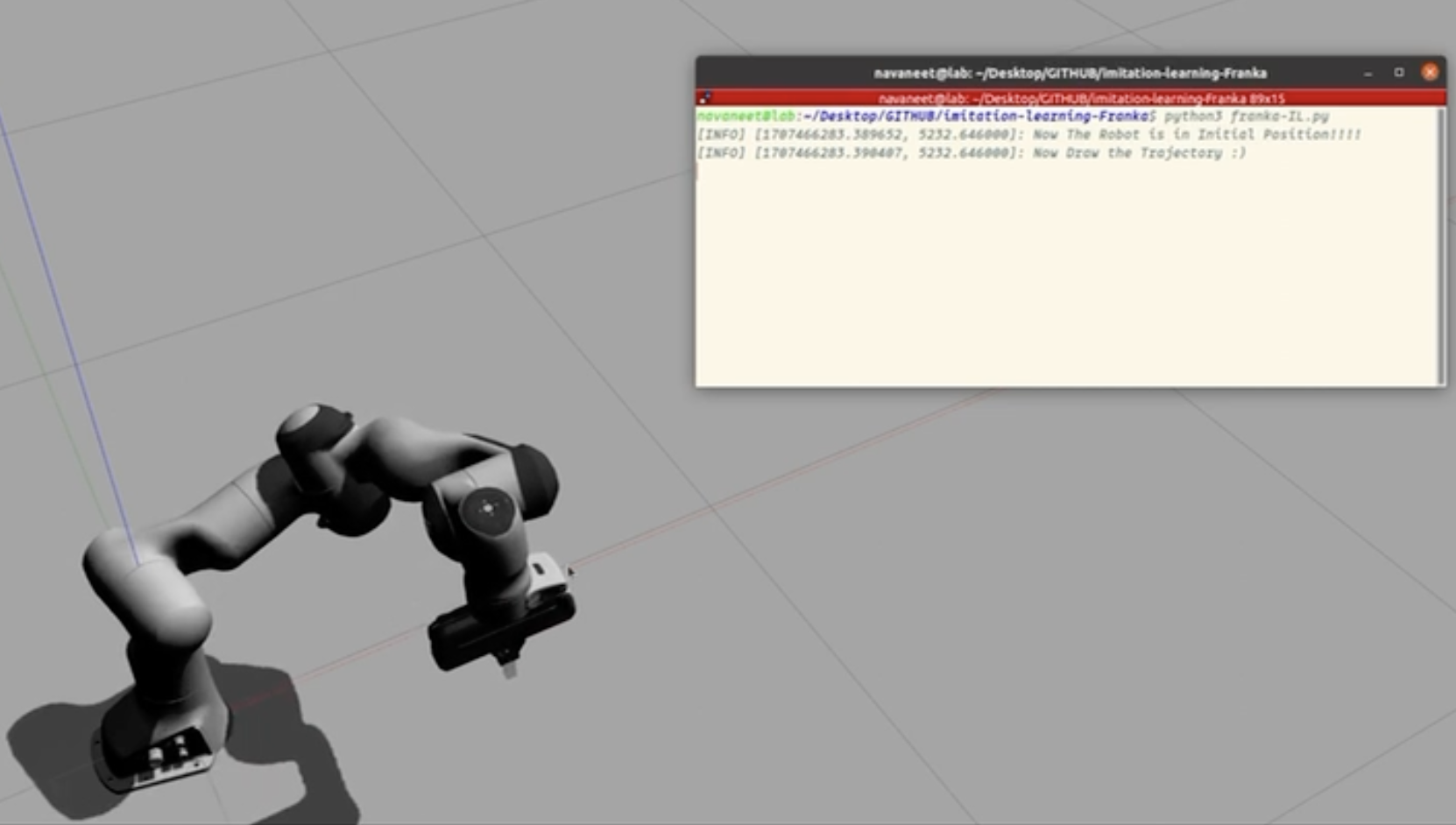
Using neural networks to teach a Franka Emika Panda robot arm to mimic human-drawn trajectories enabling precise motion control without traditional programming.
Click Here to Watch Video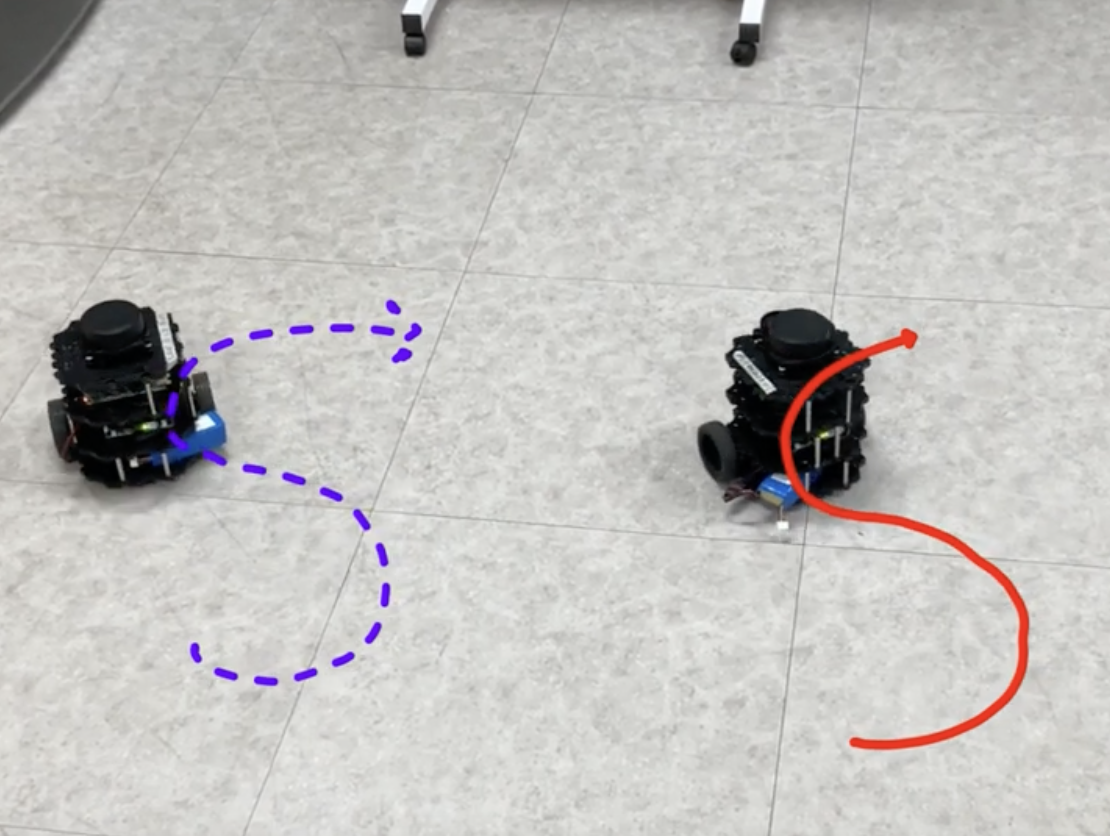
Iterative Cost Learning Model Predictive Control is applied on turtlebot leader follower tracking for achieving better control and more optimal cost. This algorithm makes the follower more autonomous and reliable.
Click Here to Watch Video
Using fuzzy logic controllers to implement leader-follower behavior in multi-robot systems for coordinated movement.
Click Here to Watch Video
Developed an intelligent drone control system that integrates real-time object detection

User-friendly drone control system operated via standard keyboard inputs, making aerial robotics accessible to novice users without specialized equipment. Features intuitive commands for real-time flight operation and basic maneuvers.
Click Here to Watch Video
Designing and implementing comprehensive smart home automation systems with IoT devices for improved comfort, security, and energy efficiency.
Conference:IEMEK 2024 (Poster presentation)
Goal:Adapt the ACT algorithm for single-arm robots in vision-based manipulation tasks.
Method: Use CVAE to predict grouped actions ("action chunks") from visual and motion data.
Training: Learned from visual demonstrations of pick-and-place tasks.
Result: Improved speed, precision, and reliability in single-arm robotic control.
Goal: Train a robot to mimic expert demonstrations using behavioral cloning.
Method: Use a neural network to map end-effector positions to joint angles.
Training: Collected data from human-guided demonstrations on a 7-DoF robot arm.
Result: Achieved high accuracy and smooth trajectory following, outperforming traditional controllers.
Status: Submitted a full length paper to NeurIPS 2025 (under double-blind review) – May 2025
Status: Submitted a journal article to Engineering Applications of Artificial Intelligence – April 2025 (under review)
Received the best thesis award at the KNU-EERC event – July 2025

Delivered an oral presentation on DLDMP at NodyCon, New York, USA – June 2025